Menghua!Turtles, lobster, squid ... TAs won the first prize in the country!
Author:Northeast University 1923 Time:2022.09.07

Turtle lobster
Squid four -footed grass
Do you think this is "Animal World"
Or "man and nature"?

This is the five national first prizes from Northeast University!
The cute "Little Turtle" has also been rated only 9 "good design" in the country!
From August 22-23, the finals of the 10th National College Student Machinery Innovation Design Contest at the "Weishi Cup" were held at Shenzhen University of Technology. All 5 works in Northeast University were finalized in the final evaluation of the National Finals. The number ranked third in the country, and also won 1 "good design" (only 9 nationwide), creating the best results in our school's history since participating in the competition.


The theme of this contest is "Nature · Harmony", which requires the design and production of the participating team's work to be "bionic machinery" or "ecological repair machinery". Take a look at the excellent works of our Dongda team!
Excellent work display
1
Coupled underwater robot based on Pacific Liri Pioneer
Instructor: The School of Mechanical College Li Xia Na, Sun Shaoni, School of Mechanical College
Participating members: Li Haoqi Zhong Yu, Wang Jincheng Han Xiao Chu Yichen
Award: National First Prize, Good Design
introduction:
At present, the common imitation paddle -shaped underwater robots on the market have greater resistance in the return journey, limiting the efficiency of robots. To this end, the student team guided by Teacher Sun Shaoni has been inspired by inspiration and innovation from the marine life Pacific Lili tortoise. Essence

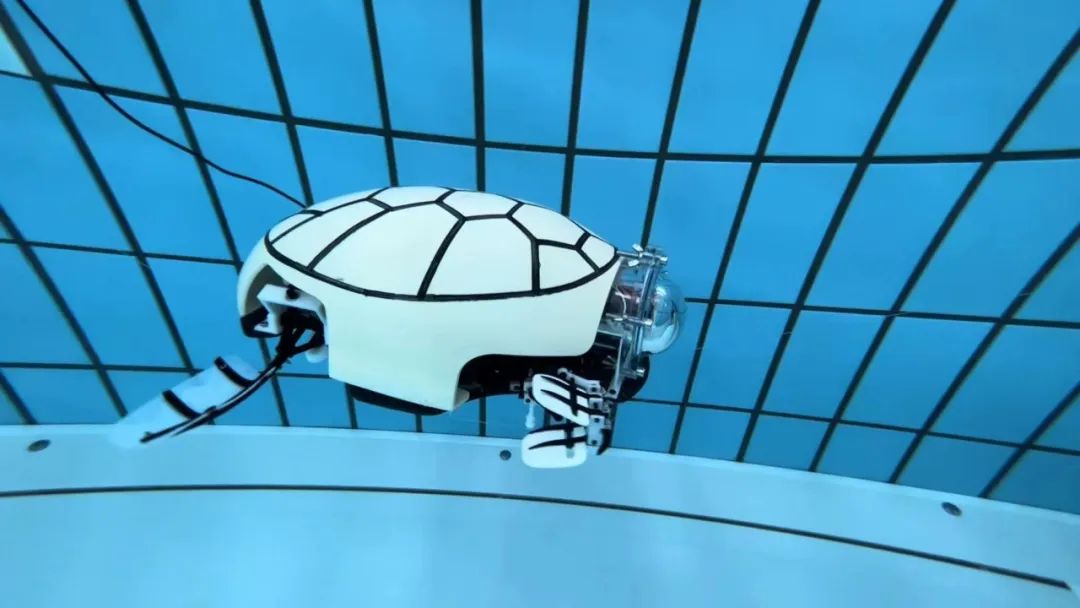
The robot uses Wroom-32 wireless IoT module to perform long-distance remote controls, which can achieve floating and lower dives, turning left and right, high-speed and low-speed battery life.
This robot almost does not affect normal underwater organisms in fishery farms. It can carry out long -term rail cruise through mobile phone control, saving time and effort, greatly reducing the cost of breeding. At the same time, as an underwater loader, different tasks such as scientific detection can also be completed with various sensors.
Acceptance speech:
Li Haoqi: I won the first prize of the National Award and won the "Good Design". In the process of preparation for one year, we have encountered many difficulties, but with the joint efforts of the guidance teacher and other team members, we Go to the end. Thanks to the school, Shuangchuang College, and the School of Mechanicals, and the teacher for their careful guidance.
2
Underwater robots based on Lai's bionic bionic
Instructor: Ma Mingxu, School of Machinery
Participating members: Zhou Yang Chu Yichen Bao Mingzheng King Jincheng
Award: National First Prize
introduction:
Aiming at the shortcomings of existing bionic underwater robots that are slow and difficult to accelerate, the wrist structure of bionic ghosts is designed to design the tail acceleration mechanism to solve the problem of slow speed and unable to accelerate.
Underwater robots based on Lai's bionic bionic, including the subject, the meat fin machine on both sides, the imitation wrist mechanism, and the center of gravity regulation. Among them, there are floats in the main body; the meat fin mechanisms on both sides are located on the left and right sides of the main body, which can achieve underwater forward, steering, and steering in place. The imitation wrist fins are located at the tail of the main body, which can achieve underwater acceleration and fast swimming. Combined with the center of gravity regulation, it can be achieved underwater upward and diving. Through the cooperation of three major institutions, it is achieved in the movement of flexible and more freedom underwater.
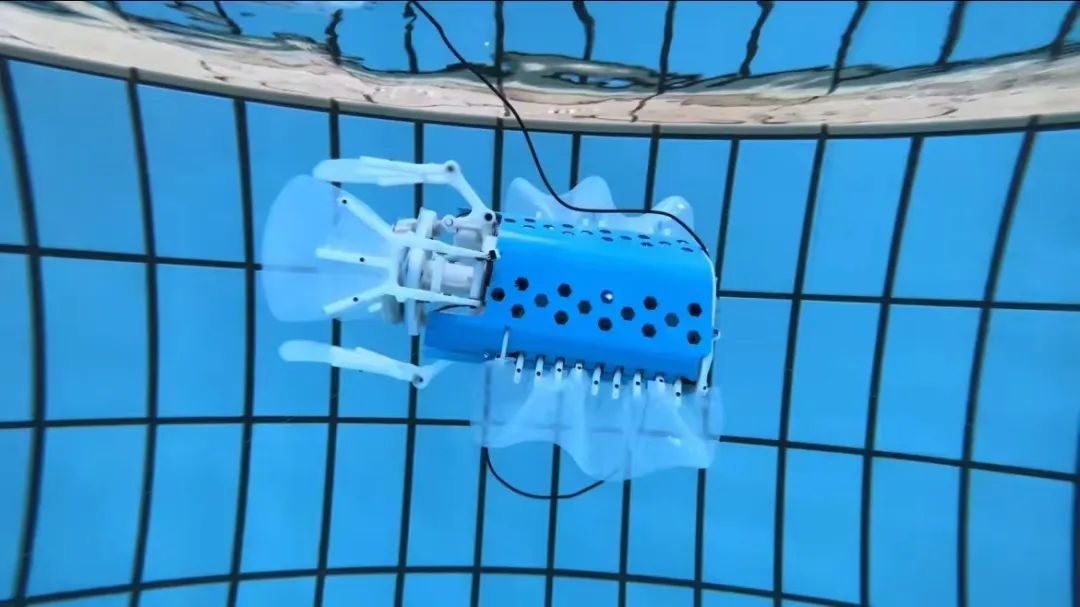

In the direction of fishery breeding, it can be applied to collecting underwater data, monitoring stealing and stealing fishing, and monitoring the number of fish groups. In addition, its highly bionic shape, low noise, and high flexibility are used in fishery farming, which will not disturb the fish groups, and can also adapt to the complex environment in fish ponds.
Acceptance speech:
Wang Jincheng: Through this machine creation competition, I understand the importance of teamwork. Coordinating and effective communication between teammates will have extremely powerful power to give full play to the advantages of everyone. In the future of learning, we will continue to work hard to design better works.
3
Based on Boston lobster bionic underwater robots
Instructor: Zhao Qunchao, School of Mechanicals, Zhao Wei, School of Mechanical College
Participating members: Xia Yifan Jinglin Xin, Wang Jincheng Cheng Chengzhengzheng Chuyichen
Award: National First Prize
introduction:
This work uses Boston lobster as the bionic prototype. In the way of simulating its movement and biological forms, combining some existing mechanical structures, it is designed and produced. Bionic lobster robot.


The robot node is connected by a flexible buffer structure, which can still be transmitted when the body is bent. The design of the abdominal and limb in the lower body to provide the motorized motivation for the robot. The parallel of the double -row mechanism can realize the differential turning action; the rear tail part of the design swing the tail institution can be used to help the upper and lower swing.
This underwater operating robot has a unique bionic design, which can replace the work of artificially completing underwater observations, underground geological sampling, fishery fishing, etc. The degree of bionic is high, the application industry covers wide, and the market potential and prospects are broad.
Acceptance speech:
Xia Yifan: I am honored and excited to win the national first prize of this competition. The process of preparation is difficult, but everyone is firm. Thanks to the school and the Innovation and Entrepreneurship College for their strong support and help during the preparation of the competition, and thank the instructor for their accompanying.
4
Twelve Freedom Candiden Candidate Candidate Four -foot Robot
instructor:
Industrial Intelligence and System Optimize Cong Dehong, a member of the National State -level Science Center: Zhou Hao Yu Lei Fan Chengzhi Zeng Yi Chen Yibo
Award: National First Prize
introduction:
Foot -class animals are optional and more adaptable because of their foothold. Therefore, bionic four -foot robots have always been a hot spot in the research of bionic fields.
Twelve freedoms connect the joints to make robots more flexible. The independently designed hollow axis and double corner position detect the large torque integrated joint to introduce the cable into the body through the empty axis to avoid scraping of the wire and improve safety. Electric muscles adopt an innovative straight -line drive method. It is efficient and simple and simple. It avoids the quality and rotation of the leg of the legs and rotation. At the same time, foot detection to form a closed loop. The coordination of momentum module and gait control cycle improves the stability of the body.
The empty axis integrated joint, electric muscle and other driver modules independently designed by this work can be widely used in the field of robotics such as industrial robots and service robots in the future to achieve large -scale production.

Zeng Yi: Thank you very much for the school, Shuangchuang College, and the School of Mechanicals, experts and teachers for careful guidance. After repeated modification and improvement, we finally ensured the quality of the work. pride!
5
Z -shaped trajectory continuously planted grass square grid laying machine
Instructor: Yang Song at the School of Mechanical and Mechanical School
Participating members: Fu Xuewen Yang Weizhen Geng Yangyang
Award: National First Prize
introduction:
This work adopts institutions such as split -scattered grass material, changing the planting method and laying trajectory, and designed the Z -shaped trajectory to continuously planted the automatic grass square latch. The automatic layout of the grass square grid is composed of a separatist grass, bending grass molding mechanism, planting and insertion mechanism, soil -cultivated compacting mechanism, and Z -type trajectory walking mechanism. The secondary laying of the second time is laying the problem that the second time it is paved.
Separate scattered grass material mechanisms, replace the original grass curtain laying, optimize the process, easy to take materials and save costs; unique plants and Z -shaped laying trajectories, insert the separated forage into the sand through the planting roller, combined with the plant -inserting mechanism Z The combination of multi -path round -trip multi -path is laid a complete grass square. It can also be layed up by misaligned multi -unit layout to achieve the effect of laying for molding. At the same time, the quality of protection is achieved. Adapt to different operating terrain, suitable for the use of different grass grid plantations such as individuals, public welfare organizations, and enterprises.

Acceptance speech:
Fu Xuewen: This competition experience will have a positive impact on my future learning and work. My professional technical ability, team collaboration ability, and problem solving ability will have unprecedented unprecedented in the process of this competition. exercise. Thanks to the opportunities and platforms provided by the school and the Innovation and Entrepreneurship College, and thank you for your careful guidance!
The National College Student Machinery Innovation Design Competition is approved by the Ministry of Education for the establishment of the Contest Organization Committee. "High -level competition in the list of competitions in the list.
The main purpose of the National College Student Machinery Innovation Design Contest is to guide colleges and universities to focus on cultivating college students 'innovative design ability, comprehensive design ability and teamwork spirit in teaching; strengthen the training of students' hands -on ability and training of engineering practice, and improve students to innovate in innovation for actual needs. Thinking, mechanical design and production such as actual work; attract and encourage the majority of students to actively participate in extracurricular scientific and technological activities to create conditions for outstanding talents.
The contest is held every two years. The contest is hosted by Shenzhen University of Technology, attracting a total of 704 universities across the country, with 5,415 entries. The Liaoning Division was awarded the outstanding organization unit of this competition. Northeast University is the secretary unit of the Liaoning Division Organizing Committee of the National College Student Mechanical Innovation Design Contest.

Strive and move forward
Dongda University, it's good!
Source | Innovation and Entrepreneurship College
- END -
Go to the trip with Shengteng: see the AI victory in Jinding City in one day

We are always looking at some things about the past, such as natural creation, his...
Sunshine Ronghe Hospital "Electronic Cloud Film" is launched: high -definition digital images, mobile phones can be checked anytime, anywhere

Have you ever encountered such troubles when you are a doctor:I did a imaging exam...